 ความเดิมจากตอนที่แล้ว…
ความเดิมจากตอนที่แล้ว…
พื้นฐานหุ่นยนต์ในงานอุตสาหกรรม ฉบับผู้ใช้งาน (ตอนที่ 2)
โครงสร้างของหุ่นยนต์สำหรับงานอุตสาหกรรมจะประกอบไปด้วยส่วนประกอบหลัก 2 ส่วน คือ ส่วนที่เป็นแทนแขน หรือ Link และส่วนที่เป็นข้อต่อ หรือ Joint ซึ่งส่วนประกอบทั้งสองส่วนนี้จะเป็นส่วนประกอบที่จะต้องทำงานตามคำสั่งที่ User ได้ทำการโปรแกรมไว้ ดังนั้น การที่จะทำการควบคุมหรือโปแกรมการทำงานของหุ่นยนต์ให้เกิดการเคลื่อนที่ได้นั้นก็จำเป็นที่จะต้องมีองค์ประกอบอื่นเข้ามาเกี่ยวข้องกับการโปรแกรมการทำงานของหุ่นยนต์ด้วย ดังที่ได้กล่าวมาแล้วว่าหุ่นยนต์นั้นก็คือเครื่องจักรกลอัตโนมัติอีกรูปแบบหนึ่งที่นำมาประยุกต์ให้สามารถทำงานทดแทนแรงงานคน ดังนั้น เมื่อเป็นเครื่องจักรกลอัตโนมัติก็หมายความว่าเราสามารถที่จะโปรแกรมการทำงานให้สามารถทำงานได้อย่างต่อเนื่องนั่นเอง โดยปกติแล้วเครื่องจักรกลอัตโนมัติทุกรูปแบบจะมีองค์ประกอบที่สำคัญอยู่ 3 ส่วน คือ
- ชิ้นส่วนทางกล (Mechanical Unit)
- ตัวควบคุมการขับเคลื่อน (Drives Unit)
- ชิ้นส่วนควบคุม (Controller Unit)
องค์ประกอบของระบบการทำงานในเครื่องจักรกลอัตโนมัติที่กล่าวมาข้างต้นทั้ง 3 ส่วนนั้น เมื่อระบบมีการสั่งให้เกิดการทำงานแล้วจะต้องทำงานในการติดต่อสื่อสารซึ่งกันและกันตลอดเวลา เพื่อให้ระบบสามารถทำงานได้อย่างถูกต้องและมีความแม่นยำ โดยในส่วนของหุ่นยนต์เองก็เช่นเดียวกัน ดังที่แสดงไว้ในรูปที่ 1
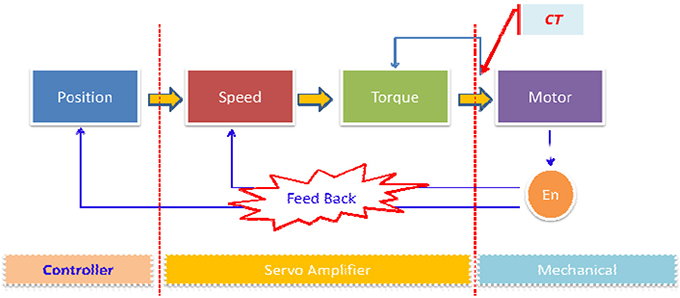
จากรูปที่ 1 แสดงให้เห็นองค์ประกอบของระบบการควบคุมเครื่องจักรกลอัตโนมัติรวมไปถึงระบบการควบคุมหุ่นยนต์อัตโนมัติด้วย หุ่นยนต์จำเป็นต้องมีการเคลื่อนที่ ดังนั้น จึงต้องมีมอเตอร์ (Motor) เป็นอุปกรณ์ขับเคลื่อนโดยมอเตอร์นั้นจะอยู่ในส่วนที่เป็น Joint ของหุ่นยนต์นั่นเอง สิ่งที่เราต้องการในการทำงานของหุ่นยนต์นั่นคือ หุ่นยนต์สามารถเคลื่อนที่ได้ โดยสามารถควบคุมความเร็ว(Speed) ของหุ่นยนต์ให้เร็วหรือช้าได้ด้วยการควบคุมมอเตอร์ นอกจากนี้ ตัวหุ่นยนต์เองจะมีน้ำหนักจากอุปกรณ์ประกอบต่างๆ รวมถึงน้ำหนักของ Link บนตัวหุ่นยนต์ น้ำหนักที่เกิดขึ้นก็คือภาระโหลดของตัวมอเตอร์ ดังนั้น มอเตอร์จึงจำเป็นที่จะต้องมีการควบคุมเรื่องของแรงบิด (Torque) เพื่อเอาชนะน้ำหนักและแรงโน้มถ่วงของโลกที่เกิดขึ้นได้ด้วย อีกทั้ง ในเมื่อหุ่นยนต์เคลื่อนที่โดยปกติก็จะต้องมีการหยุดเพื่อทำงานในตำแหน่งต่างๆ ที่ User ต้องการ มอเตอร์จึงต้องมีความแม่นยำในการทำงาน กล่าวคือ มอเตอร์จะต้องสามารถควบคุมตำแหน่ง (Position) เพื่อให้สามารถเคลื่อนจากตำแหน่งหนึ่งไปยังอีกตำแหน่งได้อย่างแม่นยำ มอเตอร์ที่นำมาใช้กับระบบหุ่นยนต์จึงต้องเป็นมอเตอร์ชนิดที่สามารถควบคุมได้นั่นคือ Servo Motor นั่นเอง กล่าวโดยสรุปแล้ว มอเตอร์ (Motor) คือส่วนที่เป็น Mechanical Unit, อุปกรณ์ที่ทำการควบคุมความเร็วและแรงบิด คือ Servo Amplifier หรือ Drives Unit และอุปกรณ์ที่ทำหน้าที่ในการคุมตำแหน่ง (Position) ก็คือส่วนของ Controller Unit และยังมีเอนโค้ดเดอร์ (En : Encoder) เป็นอุปกรณ์ที่ทำหน้าที่ในการตรวจสอบเพื่อทำหน้าที่ในการส่งสัญญาณในการทำงานของมอเตอร์ ให้เกิดความแม่นยำและถูกต้องในลักษณะของการส่งสัญญาณป้อนกลับ (Feed Back) ยังมีระบบการตรวจสอบประมาณกระแส (CT) ที่จ่ายเข้ามอเตอร์เพื่อรักษาความสามารถด้านแรงบิดของมอเตอร์ด้วย
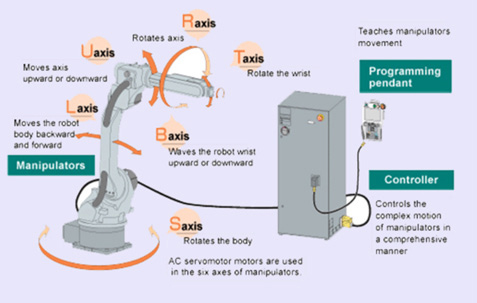
จากรูปที่ 2 ที่แสดงให้เห็นองค์ประกอบของระบบควมคุมหุ่นยนต์ ซึ่งประกอบด้วย ตัวหุ่น (Manipulator), อุปกรณ์ควบคุมและโปรแกรมหุ่นยนต์ (Programming Pendent), คอนโทรลเลอร์ (Controller) ในตอนที่แล้วเราได้รู้จักเกี่ยวกับโครงสร้างของตัวหุ่นไปแล้ว ในตอนนี้เรามาทำการรู้จักกับอุปกรณ์ควบคุมและโปรแกรมหุ่นยนต์ หรือ Programming Pendant กันต่อครับ
อุปกรณ์ควบคุมและโปรแกรมหุ่นยนต์ (Programming Pendent)

อุปกรณ์ควบคุมและโปรแกรมหุ่นยนต์ (Programming Pendent) เป็นอุปกรณ์ที่สำคัญอีกหนึ่งองค์ประกอบในการควบคุมการทำงานของหุ่นยนต์ อุปกรณ์ตัวนี้จะเป็นส่วนที่ User จะต้องใช้งานอยู่บ่อยครั้งที่สุด โดย Programming Pendant มีไว้สำหรับทำการควบคุมหรือสั่งให้หุ่นยนต์เกิดการเคลื่อนที่ไปยังตำแหน่งต่างๆ ที่เราต้องการ เราไปถึงยังทำหน้าที่ในการเขียนโปรแกรมการทำงานของของหุ่นยนต์ ตรวจสอบโปรแกรม, Start/Stop การทำงานของระบบหุ่นยนต์และยังทำหน้าที่ในการแสดงผลการทำงานต่างๆ ไม่ว่าจะเป็นข้อความ Alarm, สถานะการทำงานของหุ่นยนต์, Cycle Time ,แสดงข้อมูล Parameter ต่างๆ, จัดเก็บหรือสำรองข้อมูลโปรแกรมการทำงานของตัวหุ่น และข้อมูลอื่นๆ ที่เกี่ยวข้องกับการควบคุมหุ่นยนต์อีกมากมาย โดยอุปกรณ์ Programming Pendant นี้จะต้องทำการติดต่อสื่อสารเพื่อส่งและรับข้อมูลต่างๆกับคอนโทรลเลอร์อยู่ตลอดเวลา ทั้งนี้ หุ่นยนต์ทุกตัวจะต้องมีอุปกรณ์ตัวนี้เพื่อความสะดวกในการใช้งาน ในปัจจุบันนี้หน้าตาของ Programming Pendent ก็จะแตกต่างกันออกไปตามยี่ห้อของผู้ผลิตและได้รับการออกแบบมาเพื่อให้สามารถใช้งานได้ง่ายยิ่งขึ้น ดังแสดงในรูปที่ 3
จากรูปที่ 3 เป็นรูปที่แสดงให้เห็นถึงลักษณะของ Programming Pendant ของหุ่นยนต์ยี่ห้อ Yaskawa ซึ่งเราจะเห็นว่าบน Programming Pendent นั้น จะมีรายละเอียดและปุ่มต่างๆมากมาย ซึ่งในการใช้งานนั้นก็ขึ้นอยู่กับระดับของผู้ปฏิบัติว่ามีการปกป้องระดับของผู้ใช้งานไว้อย่างไร โดยปกติแล้วบริษัทผู้ผลิตก็จะมีการตั้งค่ามาให้แล้ว เช่น จากตัวอย่างเป็นของ Yaskawa จะมีการตั้งค่าระดับของผู้ใช้งานอยู่ 3 ระดับ ซึ่งในแต่ละระดับก็จะมีการตั้งค่ารหัสผ่านไว้ เพื่อเป็นการปกป้องการใช้งานปุ่มต่างๆ บน Programming Pendant ประกอบด้วย
- ระดับ Operator : ผู้ใช้งานระดับ Operator คือ กลุ่มผู้ใช้งานทั่วไปที่ไม่เกี่ยวข้องการเขียนโปรแกรมหุ่นยนต์ผู้ใช้งานระดับนี้จะสามารถใช้งาน Programming Pendant ได้ในเบื้องต้นเท่านั้น อาทิเช่น การสั่ง Start / Stop โปรแกรม และดูการทำงานของโปรแกรม ไม่สามารถแก้ไขหรือกดปุ่มบางปุ่มได้ โดยผู้ใช้ระดับนี้ไม่ต้องใช้รหัสผ่านในการใช้งาน
- ระดับ Editor : ผู้ใช้งานระดับ Editor คือกลุ่มผู้ใช้งานที่ได้รับสิทธิ์ในการเปลี่ยนแปลงแก้ไขโปแกรมการทำงานของหุ่นยนต์ได้ และยังสามารถทำการเขียนโปรแกรมการทำงานของหุ่นยนต์ สามารถใช้งานปุ่มคำสั่งต่างๆ บน Programming Pendant ได้ แต่จะไม่สามารถเข้าถึงการเปลี่ยนแปลง Parameter ของตัวหุ่นยนต์ได้ ผู้ใช้กลุ่มนี้จะได้รับรหัสผ่านและต้องใช้รหัสผ่านในการเปิดใช้งาน Programming Pendant ระดับ Editor
- ระดับ Management : ผู้ใช้งานระดับ Management เป็นกลุ่มผู้ใช้งานที่ได้รับสิทธิ์ให้สามารถดำเนินการต่างๆ ที่เกี่ยวข้องกับระบบการควบคุมหุ่นยนต์ได้ทั้งหมด โดยปกติแล้วกลุ่มผู้ใช้งานระดับนี้ เมื่อหุ่นยนต์ถูกใช้งานอยู่ในโรงงานและจะมีผู้สามารถเข้าถึงได้เพียงไม่กี่คนเท่านั้น เนื่องจากระดับนี้ถือเป็นระดับผู้ใช้งานที่จะต้องทำการรักษาความลับรวมไปถึงต้องดูแลให้หุ่นยนต์ทำงานได้อย่างมีประสิทธิภาพมากที่สุด ผู้ใช้กลุ่มนี้จะได้รับรหัสผ่านและต้องใช้รหัสผ่านในการเปิดใช้งาน Programming Pendant ระดับ Management ซึ่งจะเป็นรหัสผ่านที่ไม่เหมือนกับระดับ Editor
จากที่กล่าวมานั้นเมื่อเราจำเป็นต้องใช้งาน Programming Pendant เราเองก็ต้องพิจารณาด้วยว่าเราเป็นผู้ใช้งานอยู่ในระดับใด เพราะไม่เช่นนั้น เราอาจจะเกิดความสงสัยในระหว่างการใช้งานว่าทำไมถึงไม่สามารถใช้งาน หรือเข้าถึงฟังก์ชั่นและคำสั่งที่เราต้องการได้ โดยเมื่อเราเปิดใช้งานระบบในครั้งแรกหรือในขณะที่ระบบกำลังทำงานอยู่เราสามารถที่จะตรวจสอบสถานะระดับกลุ่มผู้ใช้งานได้โดยข้อมูลสถานะระดับผู้ใช้งานนั้นจะถูกแสดงในรูปแบบสัญลักษณ์ อยู่บนหน้าจอแสดงผลของ Programming Pendant นั่นเอง
รายละเอียดเบื้องต้นบนอุปกรณ์ควบคุมและโปรแกรมหุ่นยนต์
(Programming Pendent Detail)
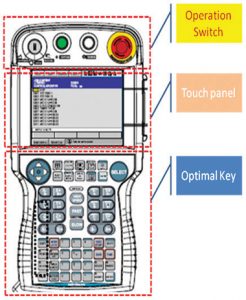
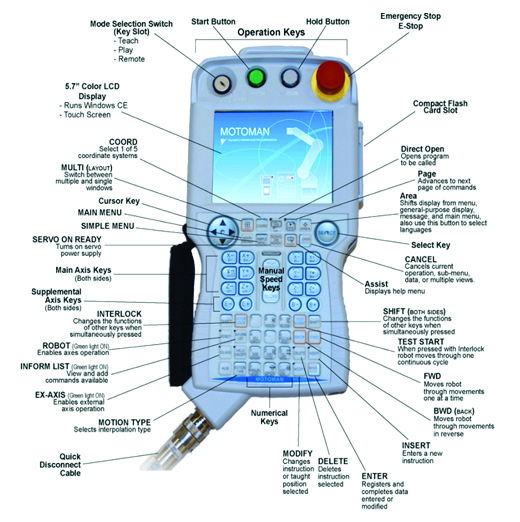
ในหัวข้อนี้จะนำเสนอให้ทุกท่านได้ทราบถึงส่วนประกอบและหน้าที่ของปุ่มกดต่างๆ บน Programming Pendant เบื้องต้นว่าประกอบไปด้วยอะไรและมีหน้าอะไรบ้าง ทั้งนี้ เพื่อเป็นพื้นฐานความรู้ในเบื้องต้นสำหรับผู้ที่กำลังจะเริ่มใช้งาน โดยจะขอยกตัวอย่าง Programming Pendant ของหุ่นยนต์ยี่ห้อ Yaskawa มาประกอบการอธิบายเพื่อให้เกิดความเข้าใจมากยิ่งขึ้น ดังรูปที่ 4
จากรูปที่ 4 เป็นการแสดงให้เห็นถึงองค์ประกอบของ Programming Pendant โดยแบ่งองค์เป็น 3 ส่วนหลักๆ ดังนี้
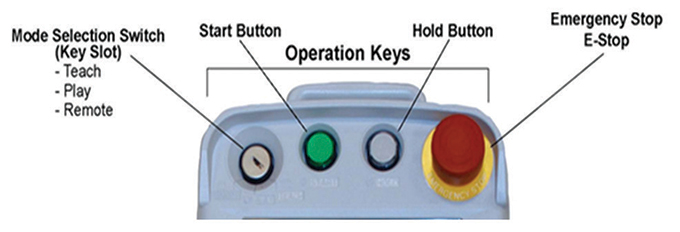
1. Operation Switch : องค์ประกอบส่วนนี้จะประกอบไปด้วยสวิตช์ต่างที่มีหน้าที่ในการควบคุมการทำงานของหุ่นยนต์หลังจากที่เรามีการโปรแกรมการทำงานเสร็จเรียบร้อยแล้ว อาทิ สวิทช์เลือกโหมดการควบคุมการทำงาน,สวิทช์ Start/Stop, Emergency Switch, Holding Switch เป็นต้น ดังตัวอย่างในรูปที่ 5
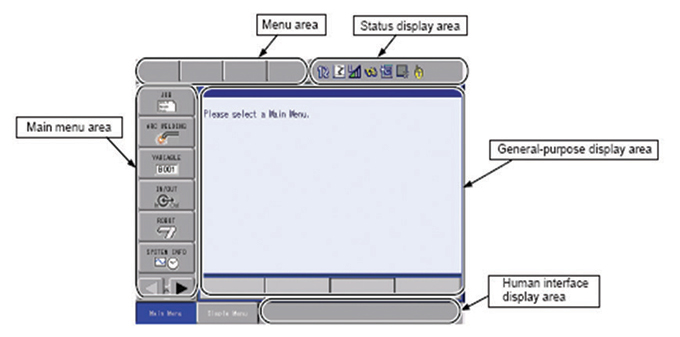
2. Touch Panel : หรือเราอาจเรียกว่าหน้าจอแสดงผล (Display) ก็ได้ ส่วนนี้จะเป็นส่วนของพื้นที่ในการแสดงผลรายละเอียดของโปรแกรมตามที่ User ต้องการ และยังเป็นพื้นที่สำหรับทำการเขียนโปรแกรมและแก้ไขโปรแกรมพร้อมทั้งแสดงการทำงานของโปแกรมอีกด้วย ในปัจจุบันด้วยเทคโนโลยีที่มีความก้าวหน้าหน้าจอแสดงผลของ Programming Pendant จึงได้รับการพัฒนาให้เป็นแบบหน้าจอ Touch Screen เราจึงเรียกว่า Touch panel โดยจะมีลักษณะคล้ายๆ กับหน้าจอคอมพิวเตอร์ กล่าวคือ บนหน้าจอจะมีปุ่มสำหรับกดผ่านบานหน้าจอและมีเมนูฟังก์ชั่นต่างๆ ให้เราสามารถใช้งานได้อย่างสะดวกอีกด้วย ดังตัวอย่างในรูปที่ 6
3. Optimal Key : ปุ่มกดต่างๆ สำหรับควบคุมหรือสั่งการหุ่นยนต์ให้เกิดการเคลื่อนและปุ่มฟังก์ชั่นพิเศษเกี่ยวกับการควบคุมและการโปรแกรมหุ่นยนต์แล้วไปถึงปุ่มสำหรับป้อนค่าตัวเลขต่างๆ ในส่วนของปุ่มกด Optimal Key เราจะใช้ในการควบคุมให้หุ่นยนต์เกิดการเคลื่อนที่ไปยังตำแหน่งต่างๆ ในขณะที่เราทำการโปรแกรมหุ่นยนต์หรือที่เรียกกันว่า Teaching และยังสามารถระบุความเร็วให้ในการเคลื่อนที่ของตัวหุ่นในขณะที่ทำการโปแกรมผ่านปุ่ม Manual Speed ได้ โดยOptimal Key บน Programming Pendant ของหุ่นยนต์แต่ละยี่ห้อก็จะมีหน้าตาและรายละเอียดที่แตกต่างกันออกไป ทั้งนี้ ขึ้นอยู่กับบริษัทผู้ผลิตในการสร้างและพัฒนาฟังก์ชั่นพิเศษสำหรับการโปรแกรมหุ่นยนต์ ซึ่งก็ถือเป็นจุดขายของแต่ละยี่ห้อนั่นเอง ดังตัวอย่างที่แสดงในรูปที่ 7
และรายละเอียดโดยรวมของ Programming Pendant ยี่ห้อ Yaskawa
จากที่กล่าวมาข้างต้นนั้น เป็นการแสดงให้เห็นถึงความสำคัญและรายละเอียดต่างๆ ของ Programming Pendent ซึ่งถือว่ามีความสำคัญค่อนข้างสูง เพราะจะเห็นได้ว่าในการควบคุมการเคลื่อนให้หุ่นยนต์เคลื่อนไปยังตำแหน่งต่างๆ รวมไปถึงการโปรแกรมการทำงานของหุ่นยนต์จะต้องอาศัย Programming Pendant เป็นสำคัญ แต่อย่างที่ได้บอกไปแล้วในข้างต้นว่า Programming Pendant ของหุ่นยนต์แต่ละยี่ห้อนั้นก็จะมีรายละเอียดที่แตกต่างกันออกไป และรายละเอียดฟังก์ชั่นการใช้งานเองก็มีค่อนข้างมาก ซึ่งในการใช้งานตามหน้างานจริงแล้วอาจไม่ได้มีการใช้งานในทุกๆ ฟังก์ชั่นเสมอไป ทั้งนี้ จากข้อมูลในเบื้องต้นเป็นการนำเสนอให้เห็นภาพรวมเท่านั้น เพื่อให้เกิดความเข้าใจในองค์ประกอบอย่างง่าย ดังนั้น ในการใช้งาน Programming Pendant จึงควรศึกษาควบคู่กับคู่มือการใช้งาน Programming Pendant ของหุ่นยนต์ที่เราใช้งานด้วยจะดีที่สุด
บทความที่เกี่ยวข้อง
- พื้นฐานหุ่นยนต์ในงานอุตสาหกรรม ฉบับผู้ใช้งาน (ตอนที่ 1)
- พื้นฐานหุ่นยนต์ในงานอุตสาหกรรม ฉบับผู้ใช้งาน (ตอนที่ 2
Source:
Credit : ภาพประกอบบทความจาก คู่มือการใช้งานหุ่นยนต์ Yasakawa : Motoman